
Робот – самостоятельный (в определенных пределах) механизм, который передвигается по определенным алгоритмам. Здесь ключевое слово “передвигается”. Хотя есть и стационарные роботы, например, на каком-нибудь производстве, но в домашних условиях намного интереснее автономные движущиеся устройства.
Есть разные принципы приведения робота в движение, все зависит от привода. Самый простой привод – колесный. Затем по сложности я бы назвал гусеничный, а затем уже всякие шагающие, прыгающие и ползающие механизмы. Даже можно рассмотреть виброботы, которые вибрируют и двигаются за счет этого. Вот только с управлением будут сложности, заставить вибробота двигаться в строго определенном направлении очень проблематично. Его движения будут сильно зависеть от поверхности по которой он передвигается.

Недорогой гусеничный тракторking force 300, кандидат на встраивание мозгов робота
Для чего делаем робота? Для участия в соревнованиях? Это накладывает определенный отпечаток на
возможности изготовления шасси. Если для развлечения, то чем робот интереснее – тем лучше.
Мне, кстати очень понравился вариант колесно-шагающего и можно сказать бегающе-прыгающего робота высокой проходимости (видео)
Правда для домашнего изготовления хочется сделать нечто более простое, чтобы получить результат как можно скорее, а не разрабатывать робота годами.
Самый простой вариант и быстрый результат – покупное шасси. Чуть посложнее, но более универсальный вариант – изготовление шасси своими руками. Какие простые шасси можно выбрать?
Шагающие – интересно, но довольно сложно. Для соревнований точно не подойдет.
Возьмем для сравнения колесный и гусеничный варианты. Начнем с колес.
Колесные шасси можно разделить по количеству колес, по типам колес и типам управления.
Количество колес:
1 колесо – экзотика. Требуется сложная система балансировки. Для домашнего изготовления конструкция сложновата. Да и представленная на рисунке фактически использует три колеса, хотя и опирается на одно круглое типа мяч, зато балансирует с кирпичом на макушке
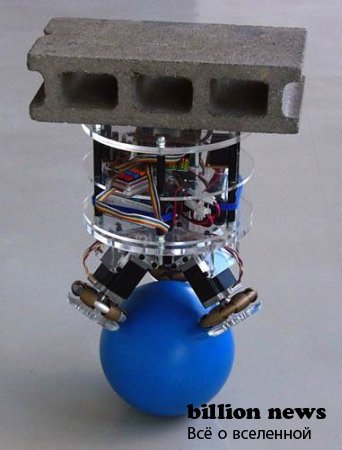
Робот на шаре, балансирует и даже может таскать кирпичи

Убегающий будильник. Два колеса и этого достаточно.
2 колеса. Распространенный тип. Есть покупные шасси на два колеса. Если центр тяжести ниже оси колес, то получаем относительно устойчивую конструкцию. Такая, например, используется в убегающем будильнике.
Если центр тяжести выше оси колес, то требуется система баланса. В любом случае такая конструкция позволяет сделать чрезвычайно маневренного и скоростного робота.
3 колеса. Самая распространенная конструкция. Зачастую, это те же два колеса с добавлением поддержки. Возможны варианты с типами колес и типом управления. Для начала рассмотрим два колеса управляющих и одно поддерживающее. Поддерживающее может быть как шаровым колесом, так и обычным мебельным всенаправленным колесиком, которое свободно вращается на своей оси и не мешает повороту тележки. В самых простых случаях, поддерживающее колесо заменяется проволочкой, которая скользит по полу.
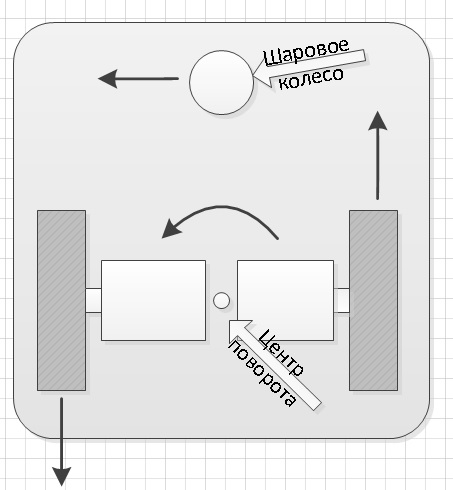
Принцип разворота на месте. Одно ведущее колесо катится вперед, другое назад, тележка разворачивается.
Поскольку управляющие колеса вращаются отдельно друг от друга, то такой привод называется дифференциальным.
Колеса вращаются независимо, поэтому для разворота на месте достаточно одно колесо запустить вперед, а второе – назад. И тележка будет разворачиваться на месте вокруг центра между колесами.
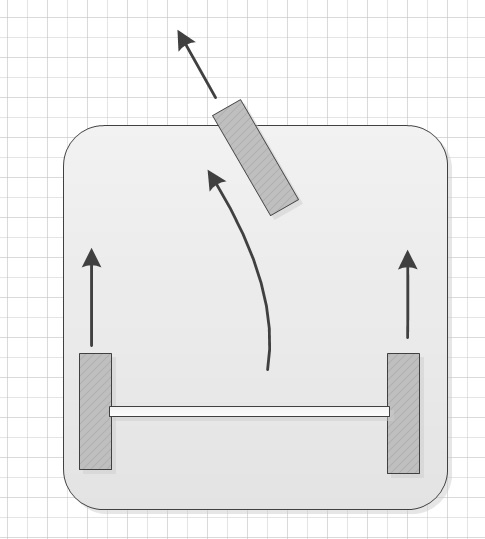
Реечная схема управления. Управляющее колесо поворачивается при помощи реек управления
Если два ведущих колеса закреплены на общей оси оси, а управление осуществляется при помощи поворота свободного колеса, то такая схема называется реечной.
Часто такая схема используется в детских машинках. Она не требует двух моторов, нужен только один, а на управление достаточно соленоида, который будет поворачивать управляющее колесо в ту или в другую сторону.
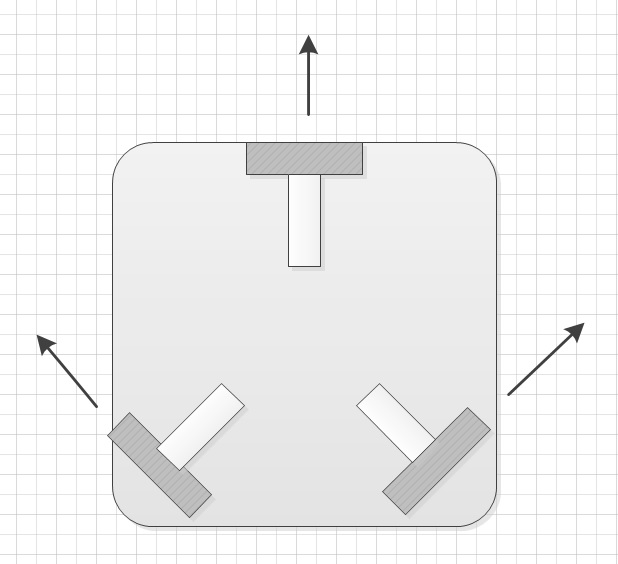
Движение прямо на трех всенаправленных колесах.
Возможна схема с тремя всенаправленными ведущими колесами в этом случае шасси получает отличную маневренность, но требует более сложного управления за счет использования трех ведущих колес.
Тележка с тремя всенаправленными колесами может перемещаться в любом направлении, но проходимость у нее небольшая. Для движения прямо необходимы отдельные усилия. Для этого два двигателя должны быть включены, а третий выключен и два ведущих как лебедь рак и щука будут тянуть тележку вперед. Правда эффективность такого движения будет под вопросом. Так что либо маневренность, либо скорость и проходимость.

Всенаправленное колесо. Не сопротивляется движению в бок счет дополнительных роликов.
Также при такой схеме также затруднен подсчет пройденного пути при помощи энкодеров, поскольку пройденный путь зависит от пройденного пути каждого из трех колес и рассчитывается по сложным формулам, когда как для реечного управления достаточно поставить на ведущее колесо один энкодер для получения точного значения пройденного пути.
Гусеничный привод очень похож на дифференциальных с той лишь разницей, что колеса соприкасаются с землей не в одной точке, а площадь контакта растянута по длине гусеницы. Что сразу уменьшает проскальзывание при прямолинейном движении, увеличивает сцепление и проходимость на мягком грунте, но требует больших затрат энергии в поворотах для компенсации бокового сопротивления гусениц. Если сила трения будет слишком большой, гусеницы могут быть даже сорваны с колес, что часто происходит с дешевыми шасси. 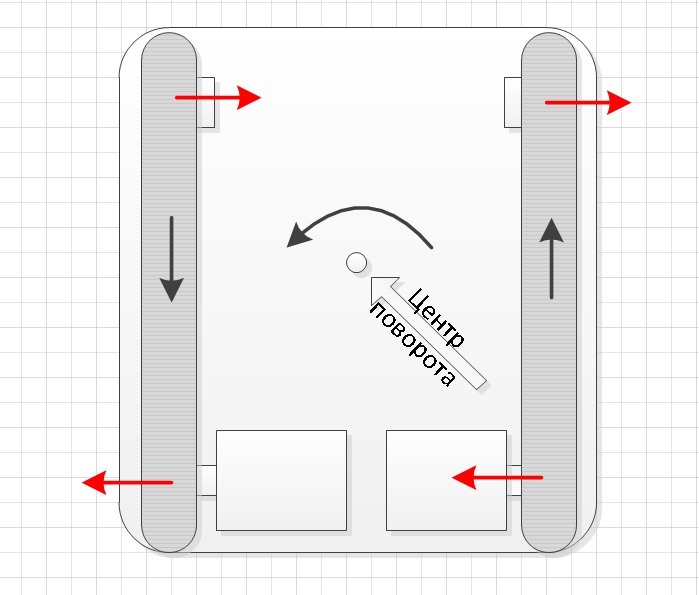
На рисунке красными стрелками показаны силы трения при левом повороте, которые действуют на гусеницу, пытаясь сорвать гусеницу и оторвать колеса. Преодоление этих сил трения требует дополнительных затрат энергии, что делает гусеничный вариант более требовательным к мощности моторов и емкости аккумуляторов.
Небольшая табличка в которой сводятся достоинства и недостатки этих вариантов шасси.
| Номер п.п | Описание | Достоинства | Недостатки |
| 1 | Дифференциальная схема с тремя колесами | Высокая маневренность вплоть до разворота на месте. Простота конструкции, дешевизна, простота управления, компактность. |
Увод в сторону при прямолинейном движении, Требует подруливания, низкая проходимость. |
| 2 | Реечная схема с тремя колесами | Дешевизна конструкции. Простота управления. Не требует подруливания при прямолинейного движения. | Низкая маневренность, большой радиус поворота. Трудность расчета необходимого угла поворота |
| 3 | Всенаправленные колеса | Высокая маневренность, возможность перемещения в любую сторону | Дороговизна, трудность управления, трудность расчета пройденного пути, низкая проходимость. |
| 4 | Гусеницы | Высокая маневренность, высокая проходимость | Большие энергозатраты на движение, необходимы более мощные моторы. Более сложная конструкция шасси. |
При самостоятельном изготовлении шасси нужно исходить из задач. Если требуется высокая маневренность и не требуется высокая проходимость, например для участия в соревнованиях по движению по линии, то дифференциальная схема с тремя колесами подходит идеально. Если желательная большая мощность, сцепление с поверхностью, например для участия в соревнованиях роботов-сумоистор, то возможно применение гусеничной платформы, но она будет проигрывать колесной по скорости и маневренности, но будет выигрывать в силе. Реечная схема слабо подходит для точного управления роботом. А схема с всенаправленными колесами, хотя и максимально маневрена, но имеет высокую стоимость и ее невозможно сделать компактной хорошо двигается только по идеально ровным поверхностям.

 (Рекомендуйте статью читателям)
(Рекомендуйте статью читателям) 
